
Un opérateur unique pour piloter à distance tout un essaim de drones. C'est l'objet du projet de supervision de systèmes d'intelligence en essaim (Susie) mené par la direction générale de l'armement (DGA), et qui est présenté au Salon du Bourget 2011.
On connaît le rôle et l'utilité des drones et autres engins autonomes sur les théâtres d'opération, et les enjeux qu'ils représentent pour l'avenir de la Défense. Mais si ces robots sont déjà au cœur des stratégies militaires, leur utilisation, très complexe, mobilise beaucoup de personnel. Aussi, la DGA a décidé de valider et soutenir le projet de recherche visant à explorer la façon dont un opérateur humain peut agir sur tout un groupe de systèmes autonomes, et le diriger à distance ; projet qui lui a été soumis par un groupement de laboratoires de Télécom Bretagne et de l'INRIA de Nancy et de deux PME (Deev-Interaction et PY-Automation).
« Notre cible première, ce sont les théâtres d'opérations. Nous voulons, à terme, proposer aux forces sur place des moyens toujours plus efficaces et plus modernes », rappelle Didier Bazalgette, responsable du domaine « homme et systèmes », de la mission pour la recherche et l'innovation scientifique de la DGA. Outre l'avantage évident d'une surveillance opérationnelle décuplée grâce à la multiplication de robots autonomes contrôlés par un opérateur unique, il faut souligner un nouvel atout de Susie. « Aujourd'hui, on peut imaginer que nos ennemis soient capables de calculer à peu près à quelle heure un drone doit repasser sur zone. Lorsque les concepts de Susie seront implantés dans un système, cela leur deviendra impossible, grâce à la multiplication du nombre de robots en vol en même temps, capables d'adapter leur parcours en temps réel. Nous gagnerons donc en imprévisibilité. »
Raisonner en essaim
Première difficulté pour y parvenir : coordonner le comportement des drones les uns par rapport aux autres. « Il faut donner aux robots une loi de comportement en essaim, c'est-à-dire les paramétrer de manière à ce qu'ils agissent en groupe et non plus individuellement, » explique Didier Bazalgette. « Pour cela, nous avons utilisé un algorithme particulier : chaque robot, en passant au dessus d'une zone, laisse une trace numérique dans l'ordinateur. Un peu comme la trace d'un avion dans le ciel qui persiste puis fini par disparaître. » Cette « trace numérique » agit comme un signal pour les autres robots, leur indiquant que l'un d'eux est déjà passé sur la zone donnée. Cela évite que deux drones effectuent la même trajectoire, ou qu'ils se percutent.
En fonction de l'algorithme choisi, la trace « s'évapore » au bout d'une durée déterminée. Si l'on veut une surveillance accrue, les traces des drones seront effacées plus rapidement, signalant ainsi aux autres que la voie est libre pour repasser.
Diriger l'essaim
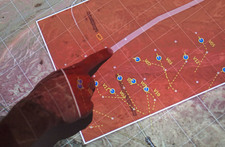
« La compréhension du comportement par essaim n'est pas naturelle pour nous, qui avons plutôt tendance à raisonner individuellement. Par exemple, dans une foule, l'homme continue à penser et à agir pour lui même, il n'a pas de logique de masse », continue Didier Bazalgette. « C'est l'autre problématique de cette étude : dépasser nos réflexes habituels, afin de développer au mieux les moyens d'interaction entre l'essaim (composé de robots autonomes pendant leur déplacements) et l'utilisateur. » En effet, si un opérateur peut piloter à distance un robot, « il lui est impossible aujourd'hui d'en contrôler plusieurs dizaines en même temps ! » Pour contrôler à distance le comportement de l'ensemble des drones, le groupe de réflexion a donc choisi des tables tactiles multi utilisateurs. Ces dernières afficheront une carte spatio-temporelle évolutive, représentant les trajets des drones. Les engins pourront ainsi tous être suivis et commandés à distance depuis une seule et même interface, quel que soit leur nombre.
Pour le savoir, rendez-vous au Salon du Bourget 2011 : la DGA y proposera des simulations de Susie. La table tactile, d'un mètre de diagonale, pourra accueillir jusqu'à quatre utilisateurs en même temps, et les opérateurs d'un jour devront faire face à deux scénarios au choix :
- un scenario de sécurité civile, qui leur demandera la surveillance d'une zone à forts risques d'incendies,
- un scenario plus axé sur la Défense, dans lequel l'essaim aura pour mission de détecter des convois de véhicules suspects sur un théâtre d'opération .
À vous de jouer !








