
Depuis la signature de la convention des Nations Unies sur le droit de la mer conclue à Montego Bay le 10 décembre 1982, chaque pays côtier a le devoir de surveiller la zone de mer qui lui a été attribuée (dite Zone Économique Exclusive) et qui s’étend jusqu’à 200 miles marins1 des côtes. La France est le 2ème pays du monde possédant la plus grande superficie de zones côtières sous sa responsabilité. Le projet SimROS, Simulateur de Radar à Onde de Surface, a pour objectif de mettre au point un démonstrateur capable de détecter des navires en haute mer (vitesse radiale et distance). Soutenu par l’Agence de l’Innovation de Défense, SimROS réunit 5 partenaires : l’institut Xlim, le Laboratoire de Génie Electrique et Electronique de Paris (GeePs - Sorbonne Université), l’ONERA, le Centre d’Ingénierie des Systèmes en Télécommunications en ElectroMagnétisme et Electronique (CISTEME) et la société IEEA.
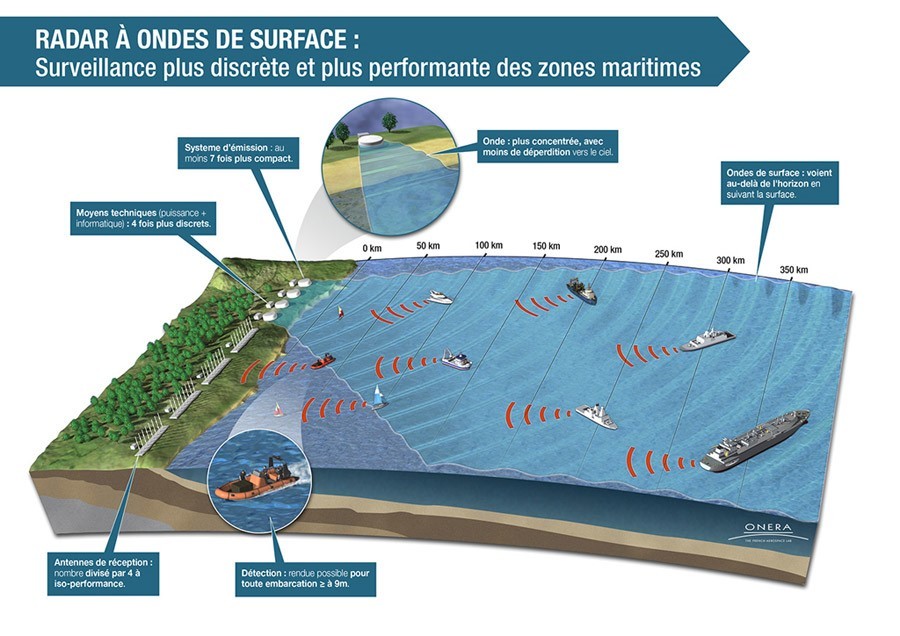
Configuration de fonctionnement d’un radar à Hautes Fréquences à onde de surface (© ONERA)
Quelle est la situation actuelle ?
Les radars Hautes Fréquences (HF) permettent la surveillance de vastes zones d’intérêt pouvant être situées à grande distance. Leur conception et l’analyse de leurs performances nécessitent un simulateur capable de représenter les environnements réalistes de propagation des ondes pouvant s’avérer complexes. Pour les radars de surveillance maritime, il est nécessaire de considérer un modèle de mer dont les paramètres varient avec la distance, pour évaluer le bilan de liaison radar, mais aussi le « fouillis de mer2 ». À une distance de quelques dizaines de miles marins des côtes, la rotondité de la Terre ne permet pas aux radars micro-ondes classiques, dont le principe repose sur une visibilité directe des cibles, de répondre au problème. La solution des radars dits « transhorizon » s’impose dans ce cas.
L’objectif de SimROS est de développer un logiciel rapide, donnant des ordres de grandeur suffisamment significatifs pour dimensionner un système radar ou démontrer la détectabilité de navires.
1-Soit 370 km
2-Le fouillis de mer est lié au déplacement des vagues qui créent par effet Doppler des raies de Bragg sur une image radar, raies qui peuvent masquer les échos de navires. Ce bruit se calcule par intégration du bruit généré sur toute la surface de mer considérée.
Comment fonctionne le simulateur SimROS ?
Afin d’évaluer la détectabilité d’un navire, le logiciel doit permettre le calcul d’un rapport signal à bruit : le signal correspond au bilan de liaison entre l’antenne d’émission et l’antenne de réception via la réflexion des ondes par le navire, en considérant le milieu de propagation marin. Le bruit désigne le fouillis ionosphérique3 et le fouillis de mer.
La fenêtre d’accueil du logiciel présente une carte générale de la France sur laquelle on superpose une carte des vents (en direction et vitesse).
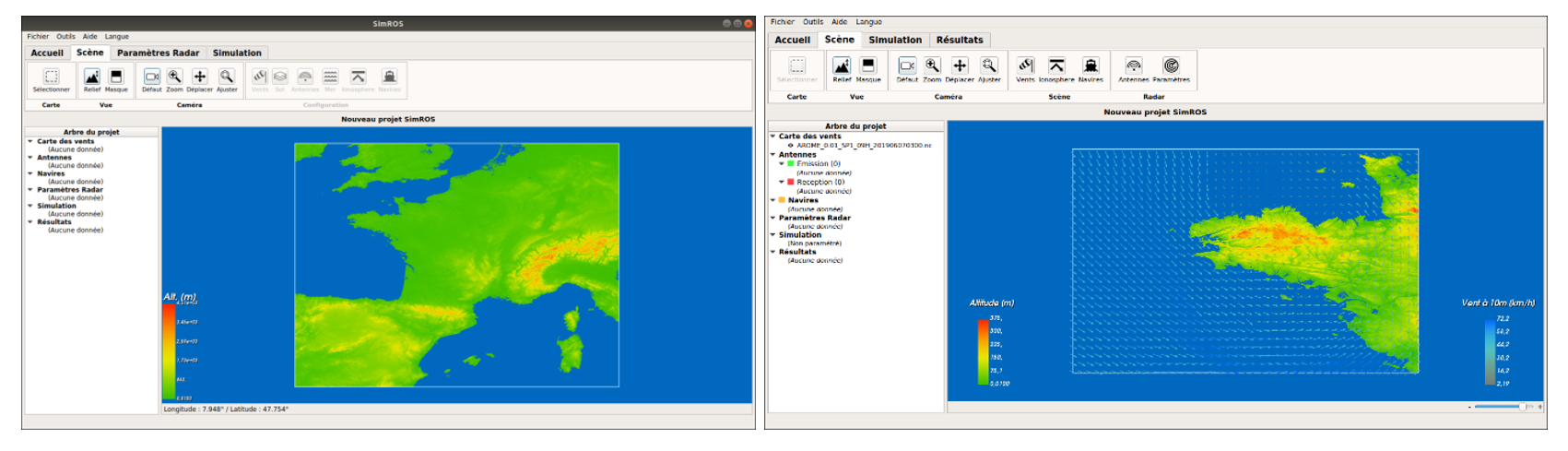
Interface graphique de SimROS – cartographies de la France projetées sur un plan et cartographies des vents sur la mer, issues des données météo AROME de Météofrance.
L’utilisateur place ensuite ses antennes d’émission et de réception aux endroits voulus. Il est à noter que, pour la réception, il a la possibilité de se focaliser sur une direction en post traitement. Ces antennes sont choisies dans une base de données préenregistrée, leurs caractéristiques de rayonnement ne font ainsi pas l’objet de calculs en direct ce qui réduit les coûts et temps de calcul. Un navire est ensuite positionné dans la scène simulée à l’écran. Comme pour les antennes, l’utilisateur va chercher le type de navire (frégate, cargo…) dans une base de données intégrée à SimROS. La propagation sur la mer est gérée par un code bidimensionnel qui permet les calculs d’atténuation du signal en fonction des états de mer rencontrés entre les antennes (émettrices et réceptrices) et le navire. Toutes ces informations permettent l’évaluation du bilan de liaison.
Les résultats attendus sont des images distance / Doppler donnant la position et la vitesse d’un navire situé dans la zone d’intérêt. C’est en émettant des signaux radars récurrents, que l’on peut déterminer4 la distance et la vitesse du navire respectivement par une analyse du temps aller-retour de l’onde électromagnétique, et par celle des temps longs, qui agrège les résultats obtenus aux différentes récurrences.
3-Ionosphère : couche supérieure de l’atmosphère terrestre qui s’étend d’environ 80km jusqu’au-delà de 1000 km d’altitude. Elle est ionisée par les rayons UV solaires.
4-A la fois en mode monostatique et bistatique
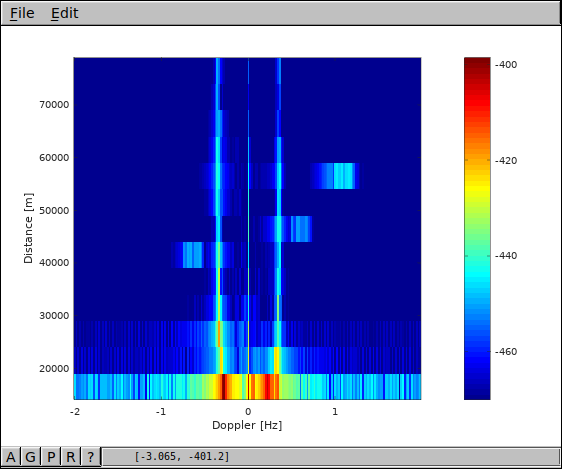
Exemple d’images doppler – distance illustrant les raies de Bragg et la distance et vitesse de 3 navires.
Modulaire par construction, SimROS permettra la prise en compte d’environnements (mer houleuse, présence d’iles,…) et de configurations (multistatique, différents navires de caractéristiques différentes,…) complexes. Par la suite, le développement d'une version consolidée est envisagé pour améliorer ses performances, enrichir la base de données de diffraction de navires et d’antennes et en faire un outil de dimensionnement de radars HF.
Droits : AID





