
Le projet AntBot est un robot à 6 pattes capable de se déplacer sans avoir recours à un GPS tout en s’inspirant des fourmis du désert qui détectent le rayonnement solaire ultraviolet. Soutenu par l’Agence de l’innovation de défense, ce robot a été développé à l’Institut des Sciences du Mouvement – Etienne-Jules Marey (ISM UMR7287 : CNRS / Aix Marseille Université), dans le cadre des travaux de thèse de Julien Dupeyroux. Le projet a aussi bénéficié du soutien de l’Agence nationale de la recherche dans le cadre du projet Equipex/Robotex pour le financement de la plateforme technologique.

Image de couverture : AntBot, Julien Dupeyroux, Institut des Sciences du Mouvement - Etienne-Jules Marey (CNRS – AMU), tiré de Dupeyroux, J., Serres, J. R., & Viollet, S. (2019). AntBot: A six-legged walking robot able to home like desert ants in outdoor environments. Science Robotics, 4(27), eaau0307, DOI: 10.1126/scirobotics.aau0307.
La fourmi du désert Cataglyphis est réputée pour sa capacité à se déplacer dans un milieu particulièrement aride. Contrairement aux autres fourmis vivant dans des climats plus cléments, la fourmi du désert ne peut utiliser de pistes phéromonales et se fie complètement à ses autres sens pour se déplacer et parcourir plusieurs centaines de mètres. Inversement à l’œil humain, insensible aux rayonnements ultraviolets et à la lumière polarisée, la fourmi est capable de mesurer son cap afin de savoir à n’importe quel moment où elle se situe et comment retourner à son nid. Comment ? Tout d’abord grâce à une « boussole céleste », i.e. regardant le ciel, qui lui permet de mesurer son cap et de s’orienter en utilisant le motif de polarisation du ciel, puis en mesurant la distance parcourue en comptant ses pas et en intégrant la vitesse de défilement optique du sol, mesurée par un autre petit œil orienté vers le bas. La distance et le cap sont les deux informations cruciales lui permettant de connaitre sa localisation par rapport à son point de départ.
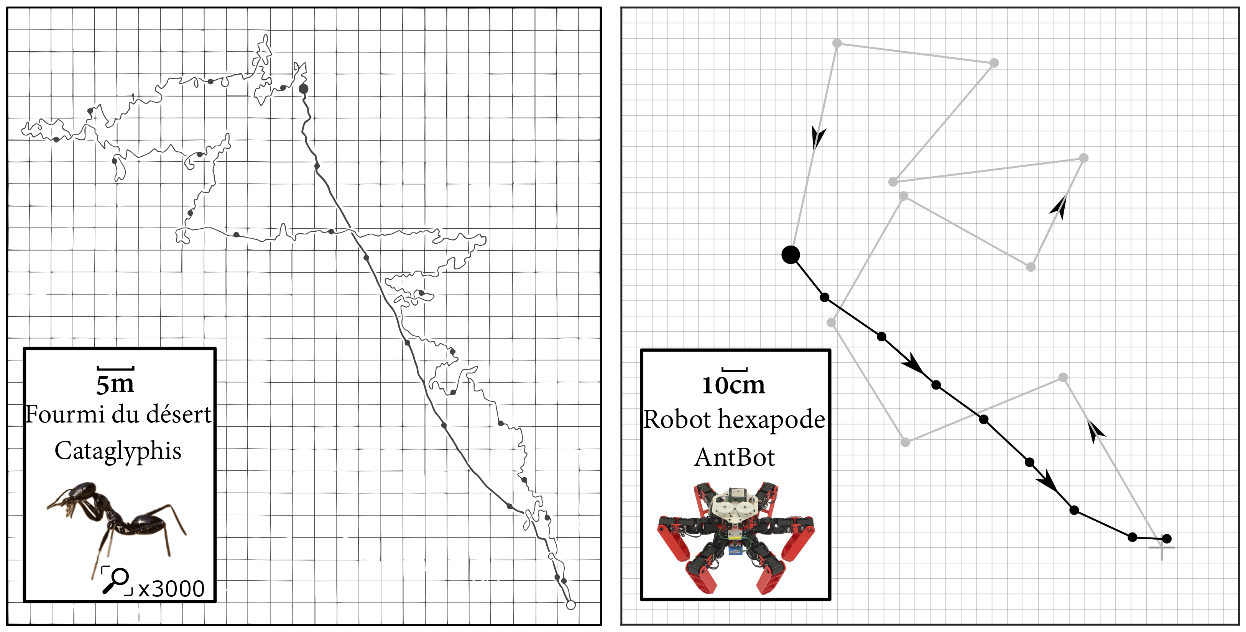
Comparaison fourmis – AntBot par Julien Dupeyroux, Institut des Sciences du Mouvement - Etienne-Jules Marey (CNRS – AMU) issue de Dupeyroux, J., Serres, J. R., & Viollet, S. (2019). AntBot: A six-legged walking robot able to home like desert ants in outdoor environments. Science Robotics, 4(27), eaau0307, DOI: 10.1126/scirobotics.aau0307.
Les chercheurs de l’ISM ont ainsi construit une véritable fourmi robotique, AntBot, en reproduisant les capacités de navigation des fourmis Cataglyphis.
AntBot est doté d’un compas optique, permettant de déterminer le cap grâce à la lumière polarisée venant du ciel, et d’un capteur de défilement optique dirigé vers le sol dans le but de mesurer la distance parcourue. Ce compas optique utilise les rayons ultraviolets du ciel. Cette boussole céleste confère à AntBot la capacité à mesurer son cap avec une précision de 0,4° sous toute couverture nuageuse et de niveau d’index UV. Ce niveau de performance a permis au robot de retrouver son point de départ avec une précision de quelques centimètres (6,7cm pour une foulée de 8,2cm) sans exploiter ni cartographie ni GPS ni compas magnétique ni centrale inertielle, avec une performance répétable observée sur des trajets de 15 mètres.

Boussole céleste par Julien Dupeyroux, Institut des Sciences du Mouvement - Etienne-Jules Marey (CNRS – AMU) issue de Dupeyroux, J., Serres, J. R., & Viollet, S. (2019). AntBot: A six-legged walking robot able to home like desert ants in outdoor environments. Science Robotics, 4(27), eaau0307, DOI: 10.1126/scirobotics.aau0307.
AntBot est doté de 6 pattes, ce qui lui permet une plus grande mobilité par rapport aux robots à roues développés aujourd’hui. La robotique à pattes permettra à terme de se déplacer dans des environnements plus complexes : zones sinistrées, terrains accidentés… Néanmoins, AntBot n’a pas été développé à des fins d’endurance, une nouvelle thèse financée par l’Agence de l’innovation de défense est en cours au sein de l’ISM pour traiter cette thématique.
Pour capter la lumière polarisée, la boussole optique d’AntBot exploite 748 points de mesure du motif de polarisation du ciel au niveau du zénith, or AntBot n’est équipé que de deux pixels (ou photodétecteurs UV) coiffés de filtres polarisés rotatifs. Cette astuce aura permis de réduire le coût de production à quelques centaines d’euros, tout en respectant l’exigence biomimétique, contre un coût d’environ 78 000 € si les chercheurs avaient dû construire une boussole avec 748 photodétecteurs UV.
Cette boussole pourrait à l’avenir équiper des véhicules autonomes, des robots explorateurs voire des drones où la discrétion radar est de mise, tout en les rendant insensibles à la guerre du GPS.
AntBot a constitué une expérience scientifique de tout premier plan saluée sur le plan international, et suscite aujourd’hui la curiosité de différents acteurs industriels.
Des projets sont en cours afin de faire fonctionner AntBot de nuit, notamment en impliquant les domaines de la microélectronique et de la nano gravure pour construire une rétine biomimétique sensible aux rayonnements UV polarisés fonctionnant sous de très faibles rayonnements émis par la lune. Encore une fois, la nature fournit le cap à suivre : étudier certains insectes naviguant de nuit sur de longue distance pourrait alors constituer une solution pour augmenter le domaine d’opérabilité d’AntBot.
Droits : AID





